
无人机在精准农业中的关键技术及应用

航空植保是指利用飞机和喷施装置进行喷施农药的措施。相比于传统的地面机械田间作业,航空植保不受到地理因素的制约,具有高效空中作业的优势。由于其突击能力强,因此更利于爆发性病虫害的控制。以麦田灭草为例,空中作业比地面机械作业效率高5~7倍,相当于人工喷雾的200~250倍。航空植保还具有作业成本低、不受作物长势限制以及不损坏农作物等特点。
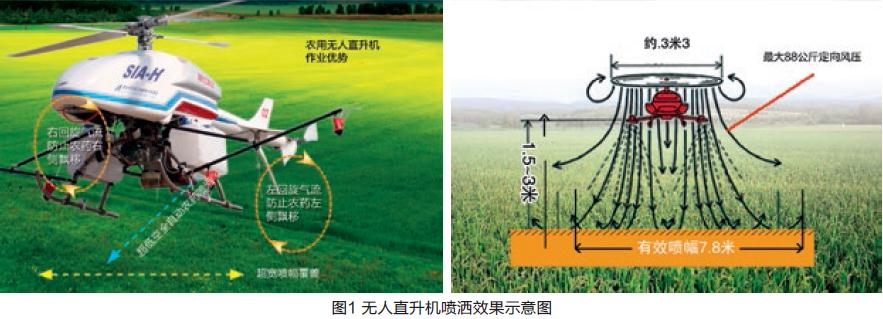
轻型无人直升机具有直升机高效的作业性能和良好的喷洒效果;采用超低空作业,喷洒时漂移减少,使作业环境空气中农药的含量大大降低,减少了对环境的污染(如图1所示);自动导航控制技术的采用,保证了操作者的安全性;同时由于无人直升机航空植保技术的自动化程度高,作业机组的人员少,且大大降低了劳动强度。目前,无人直升机航空植保仍处于探索和试验阶段,普遍存在较多限制其应用并大范围推广的技术难题。
技术难题
为了达到理想的喷施效果,要求无人直升机在距作物3~4米的高度进行药液的喷洒。那么无人直升机超低空飞行时,由于距离地面较近,主旋翼产生的气流会直接地作用在作物上。虽然这种下洗气流对于农药的沉积和作物叶面附着面积有着积极作用,但是当无人直升机主旋翼产生的气流过强时,农业作物会产生倒伏,不但影响了作物的生长,也降低了喷洒的效果。
其次,近地面飞行产生的地效效应(或称地面效应)恶化了飞机本体姿态的有效控制,致使安装在无人直升机上的药液喷洒装置不能够水平地对准作物喷施药液,从而导致喷施不均匀,且增加了飘移,削弱了农药喷施的效果。
再则,在针对我国农场面积大,且耕地和农场类型不同特点,可以采用大载药量且不同类型喷头的无人直升机实施植保作业,并可以根据不同的农业特点适应长航时、大载药量的工作要求,最大限度地避免了在喷施过程中的由于航时和载药量导致的反复起降,在提高作业效率的同时也降低了生产成本和飞机的维护成本。
最后,无人直升机航空植保的相关行业准则和法规的空白也造成了目前无作业规程、喷洒标准等现状,制约了这项技术大规模、标准化地投入到农业生产中。
鉴于我国航空植保用无人直升机施药系统存在的上述问题和技术瓶颈,在国家科技支撑计划、国家“863”项目以及中科院重要创新项目资助下,中国科学院沈阳自动化研究所突破了多项关键技术,完成了农田精准施药无人直升机系统研制与示范应用工作。目前已经小批量生产并交付用户使用。
关键技术突破
(1)大载荷、高机动无人直升机设计技术
农田精准施药无人直升机采用国际先进的主动式无人直升机结构设计理念,即先由飞行控制研究人员与无人直升机机构设计人员共同提出飞行动力学数学模型,再依据数学模型设计本体的机械构造,使其满足系统设计的预期指标。大量的实验数据表明,所研制的无人直升机的各项动力学系数较之西方发达国家已经公开的型号更加合理,飞机在低空低速状态下的稳定性更好。
主旋翼选用法国航宇公司的OA翼型系列的212翼型;油箱采用双油箱布局,减小油耗导致的重心偏移;发动机选用汽油机,位置在无人直升机重心附近,消音器后置,消音器排气口远离摄像系统,避免废气污染摄像系统。摄像系统前置,保证空间直角坐标五、六象限视场无干涉构件;旋翼系统选择跷跷板式,变矩铰采用自润滑轴承,挥舞铰,摆振铰有橡胶阻尼;旋翼的操纵方式采用Hiller伺服小翼,以减小操纵系统的载荷,小翼的转动惯量增大了旋翼气动阻尼,提高飞行稳定性。减速箱与主输出轴之间有超越离合器,发动机空中停车时主旋翼可气动自旋,保证直升机安全着陆。系统设计和建设符合国际标准、国家标准、工业标准和事实标准。相应的控制技术、定位技术、信息采集、信息传输、信息接收与处置符合国家规范,便于信息有效处理和交换。无人直升机选用大力矩舵机控制飞行姿态,采用CCPM混控方式,分别控制螺距(总矩),升降(俯仰),副翼(侧倾)飞行姿态。
(2)超低空高度自动跟踪飞行控制技术
针对农用无人直升机在进行施肥、浇灌、施药过程中的超低空作业特点,同时考虑到作业农田的实际地形不平坦,从导航系统和飞行控制系统两个方面对现有无人直升机进行了改进,以实现无人直升机在超低空的高度自动跟踪飞行控制。在导航系统方面,通过加装激光对地测距仪以及差分GPS定位系统,实现了精确的对地相对高度和绝对高度测量,达到了厘米级的定位精度。在飞行控制系统方面,主要需要消除超低空环境下的强地效影响以及紊乱气流影响。通过在线逆动力学建模实时地对地效影响以及气流影响进行在线辨识,而后基于辨识结果计算得到前馈控制量,结合传统的飞行控制量以最终实现在超低空情况下的高度稳定控制。
(3)施药环境自适应航迹规划技术
为简化作业流程,需要无人直升机能够根据施药环境进行自适应航迹规划,并最终引导完成设定作业任务。在此假定作业农田为四边形,地面操作人员需要通过地面控制站设定作业农田4个顶点的GPS位置。基于得到的4个GPS坐标,依据无人直升机单次作业范围,按照遍历整个作业区域的需求,控制器在线自动完成航迹规划任务,并以此规划结果引导无人直升机完成设定任务。
(4)喷洒载荷系统研制及自动精准流控技术
低空喷雾作业中关键要解决的难点问题是提高药液的雾化,减少雾滴的漂移,提高雾滴在作物中穿透性和在叶面的沉积率,从而提高农药的利用率。根据低空飞行无人直升机的飞行状态进行可控的精量喷雾决策模型,同时根据无人直升机和作物长势信息作出喷施决策,通过可控施药装备进行执行实施,通过改变喷嘴的流量、压力、高压静电参数,喷臂的姿态等获得最佳的喷施效果,如图2所示。根据实时的无人直升机飞行高度、飞行速度,依据设定的施药深度要求,实时计算得到当前施药电液的喷洒流量。为实现喷洒速度的精确控制,引入闭环比例控制器。首先通过流量测量仪得到当前喷洒流量,以此作为反馈信息结合计算得到的期望喷洒流量,采用PI控制实现快速精确的流量控制,保证了作业过程中整个作业区域的施药均匀,同时施药深度满足预定要求。

(5)基于光谱信息的秧苗长势与施药量分析技术
小麦植株感染蚜虫后,因其吸取小麦汁液,植株叶片叶绿素含量发生变化;同时,蚜虫分泌的蜜露吸附了较多的空气灰尘或者其他物质,导致叶片呈现油黑色,严重地影响其光合作用。这为我们用高光谱遥感影像、数据来对条锈病害的监测提供了一种可视信息。为了搞清楚蚜虫对冬小麦的危害以及受蚜虫危害后其光谱的变化,分析比较了蚜虫不同危害程度下的冬小麦冠层光谱。随着蚜虫危害程度的加重,在可见光波段的光谱反射率逐渐减小。
根据受麦蚜危害的冬小麦冠层光谱特征差异及规律,以不同蚜害程度引起可见光、近红外的反射率变化率来定义了相对的蚜害高光谱指数(AHVI),并以各波段变化率的贡献大小附以相应权重。再利用实验获取的26个不同蚜害等级的冬小麦光谱数据,构建蚜害等级的遥感反演模型,由此可以发现蚜害高光谱指数与蚜害等级呈极显著正相关,见表1。
示范应用
2012年,中科院沈自所研发的农业无人直升机先后对苏州、新疆伊犁、辽宁法库等地的水稻田、棉花田、玉米田病虫害区域进行了超低空精准变量农药喷洒,展示了该无人机在农田病虫害防治及突发灾害中的实际作业能力,完成了农田施药无人直升机技术定型。2013年,在成都、杨凌、佳木斯、西安、全椒、昌吉等地开展农业应用展示工作,获得农业展会最高奖“后稷特别奖”,并与昌吉州签订长期农业基地合作意向。与新疆生产建设兵团农四师七十团联合申报并获批国家星火计划项目,为农业飞行机器人未来产品化研制提供项目支持。
团队介绍
中国科学院自动化所机器人学国家重点实验室于2002年组建。近年来,打破国外技术封锁,依靠自主创新,在无人直升机及相关技术的研发上接连取得突破,研发了40公斤、100公斤、120公斤、200公斤、700公斤级等系列化无人直升机系统,整体技术水平先进。
无人直升机研发团队现有成员30余名,其中研究员4人,副研究员6人,博士生导师2人,硕士生导师8人。迄今为止完成或在研国家“973”、国家“863”重点项目、国家709专项、国家自然科学基金重点项目、国家支撑项目、国家智能电网示范项目、中国科学院方向性项目等国家重大、重点项目10多项,申请专利23项,获得国家、省部级奖励10项,发表论文80余篇。
作者单位:中国科学院沈阳自动化研究所


版权:《高科技与产业化》编辑部版权所有 京ICP备12041800号 地址:北京市海淀区中关村北四环西路33号 邮编:100080 联系电话:(010)82626611-6618 传真:(010)82627674 联系邮箱:hitech@mail.las.ac.cn |