
能够自适应的机器人
与动物可以主动识别环境,以及迅速适应受伤情况不同,制造出在遭受损伤后能够恢复的机器人的问题一直困扰着科学家。针对该问题,法国国立计算机与自动化研究所助理研究员Jean-Baptiste Mouret及其同事开发了一种智能试错算法,能让受损的机器人可以迅速恢复其执行任务能力。
Mouret在接受《高科技与产业化》记者专访时表示,“该算法使机器人能够预测哪些补偿行为在遭受损害后最有可能成功。这项新技术在六条腿机器人和机械手臂实验中都被证实可行,能够帮助发展更稳健、高效和自主的机器人。”
本刊记者:为何需要能自我修复的机器人?
Mouret:自我修复的机器人最重要的特点之一就是能长期工作,不需要人们时常维修。例如,如果让机器人执行地震、森林火灾或类似福岛核电站等关闭的核电站等的搜索工作,即便受伤,我们也需要它们继续工作。在这些非常难以预知和不友好的环境中,机器人每一秒钟都可能受伤。即便在非极端环境下,例如帮助护理老人或病人的家庭机器人助手,即便其部件损坏,我们也希望机器人能执行重要任务。总之,快速、有效并能从损伤中恢复的算法,能让机器人更有效、更可靠。
本刊记者:对于机器人而言,阻碍其广泛适应外部复杂环境的一个主要因素是它的脆弱性。开发能自我适应环境的机器人的难点在哪里?
Mouret:由于很难预期所有可能出现的情况,因此开发能适应复杂环境的机器人十分困难。一个经典案例是阿波罗13号事故:数百人的团队设想了几乎所有可能出现的情况,但十分罕见的意外发生了:服务舱的氧气罐发生的爆炸严重损坏了航天器,使其大量损失氧气和电力,但在飞控中心科学家、工程师的创造力的帮助下,终于找出解决方案,让宇航员重返地球。
本刊记者:这个智能试错算法让机器人能够在受损两分钟内适应过来?
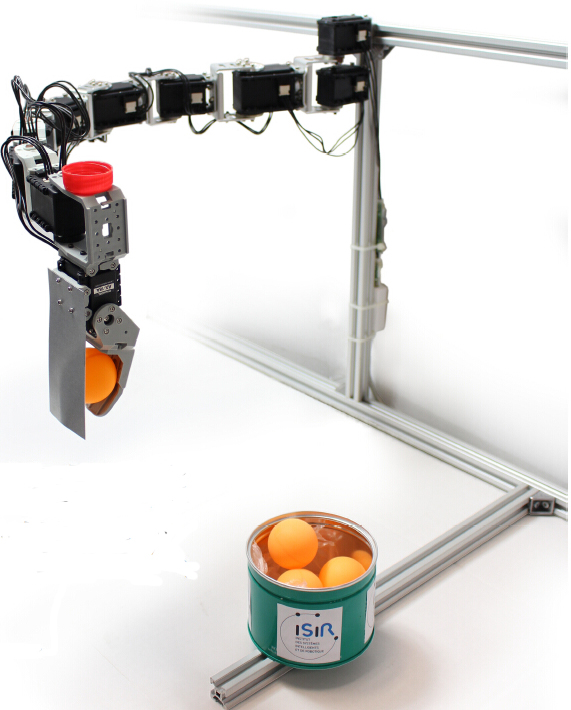
Mouret:是的。机器人会尝试各种预测结果良好的行为,例如,一个六条腿机器人在遭受了腿受损、断裂和丢失等5种不同的损伤,以及一个机械手臂的关节用14种不同方法弄断后,都可以成功采用这种算法来适应。这里需要强调的是,机器人从不试着理解损伤,而是搜寻能在损伤状态下继续工作的方法。换句话说,机器人并不准确地知道它损坏了,而只知道执行力突然降低。机器人永远不是工程师,不会那么智能。
本刊记者:该算法的主要优势是什么?
Mouret:新算法基于两个步骤:第一,开发能使用未受损的仿真机器人建立可能的行为(如步态)图纸的算法(我们建立了约1.3万个不同的行为);第二,用在线自适应算法从中找出最有希望的行为作指导。
新算法主要的优势是不需要进行识别。由于需要许多传感器,因此识别行为通常十分困难且成本高昂。此外,与传统的强化学习(RL)方法相比,我们自始至终都用真实的机器人进行设计研究,而非仅用仿真模型。只需要几个物理试验(最多12个)就可以知道怎样做,因此机器人的反应相当快。
本刊记者:它带给你惊喜过吗?
Mouret:当然。两年前,我们被告知有著名的科学家要前来访问。我们机构十分重视,希望一切都能做好,因此在前一天为地板打了蜡。地板看起来很干净,但也很滑!我们测试了机器人之前学习的步态,这些步态之前已经测试过很多遍,以确保能顺利向来宾展示,结果因为地板的问题,它们刚开始的时候完全不工作。不过幸运的是,我们的机器人能适应!我们启动了智能试错算法,几分钟后,机器人在刚打了蜡的地板上开始再次行走。你能想象,来访的“大牛”多喜欢我们的成果。
本刊记者:未来机器人会有什么特点?
Mouret:未来的机器人将更万能。这就意味着在面对意外状况时,它们可能有许多方式执行任务。例如,人类有两只手臂:如果无法用一只手臂完成一件事,会试着用另一只。同样,动物也有许多关节和肌肉,能让它们以许多不同的方式运动。
无论如何,随着多关节和电动机的发展,机器人将需要这样一个算法:能让它们像动物一样快速发现执行任务的新方法。


版权:《高科技与产业化》编辑部版权所有 京ICP备12041800号 地址:北京市海淀区中关村北四环西路33号 邮编:100080 联系电话:(010)82626611-6618 传真:(010)82627674 联系邮箱:hitech@mail.las.ac.cn |