
仿生机器人技术发展概况
借鉴数学、力学、电子学、计算机和控制科学等多学科工作,机器人功能和性能得到极大提升,但学者们也切实感到机器人和自然生物之间在系统自主性、环境适应性等诸多方面还存在着巨大差距。因此,通过仿生机器人的研究,研究者希望机器人能够复现生物的某种自然功能和效果,或完全复现其自然功能、效果和内在运行机制,从而大幅提高机器人的环境适应能力、感知能力、自主控制与智能决策能力、交互能力,乃至协作能力。
仿生机器人研究涉及机构仿生、感知仿生、控制仿生、智能仿生等关键技术。基于这些关键技术可形成多种类型的仿生机器人系统,如仿生机器人、仿动物机器人、灵巧手、仿生眼等。下面重点介绍仿人机器人、仿生四足机器人、仿生机器鱼等仿生机器人系统。
仿人机器人
仿人机器人是模仿人类形态、运动、感知和交互功能的机器人系统。通过研发工作,最终希望仿生机器人可在环境中自由运动并能够使用各类工具,在危险环境下代替人进行工作,或在日常生活中为人提供服务。
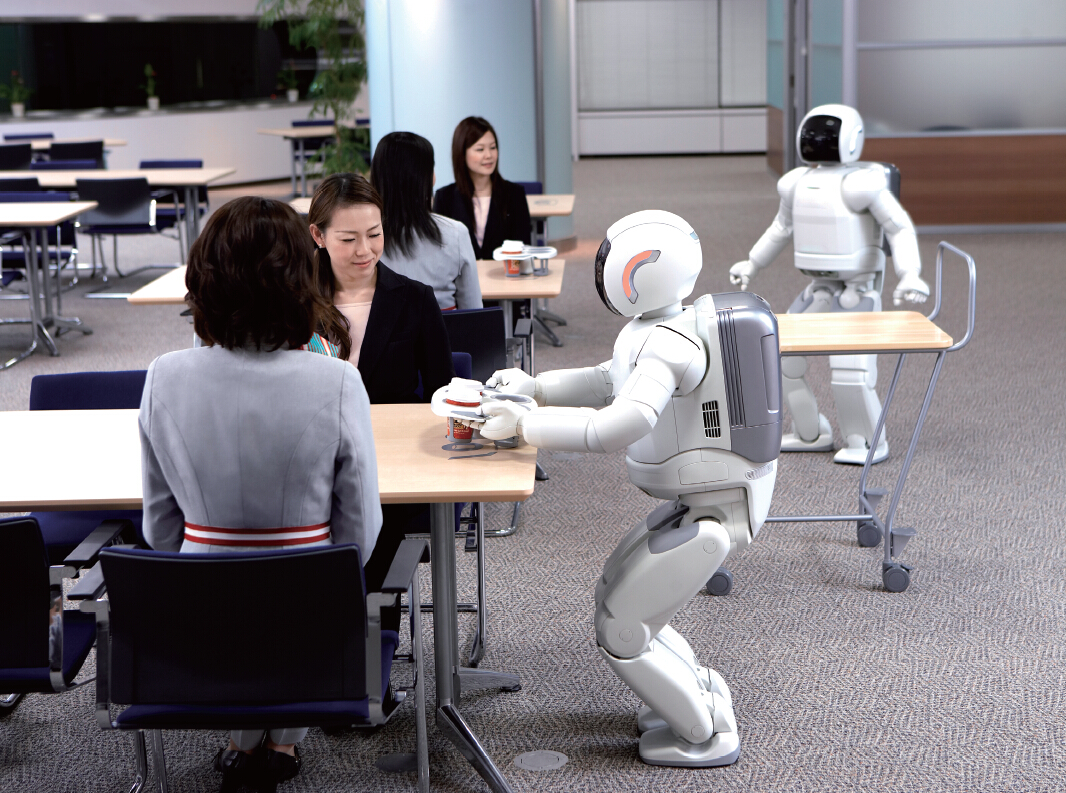
波士顿动力公司开发的液压驱动双足步行机器人Atlas等,其行走过程具有良好的柔性和环境适应性,可完成上下台阶、俯卧撑、跨越障碍、跳跃、在室外行走等。本田公司研制的仿人机器人ASIMO,可完成行走、上下台阶、弯腰、小跑、端水等动作,还能够与人进行对话,手势交流,视觉识别出人和物体、辨别说话人等。NASA开发了具有灵巧手指的双臂机器人宇航员并将用于空间站。Aldebaran机器人公司开发仿人机器人Nao,集成了视觉、听觉、压力、红外、接触等多种传感器,通过编程可实现舞蹈、与人交互等功能,可用于很多研究和娱乐展示。该公司还开放了pepper仿人机器人。日本大阪大学石黑浩教授开发了外形与人高度相似的高仿真人形机器人,并能够进行人机对话。
在我国,国防科技大学、哈尔滨工业大学、清华大学都研制开发了双足步行机器人。北京理工大学研制的仿人机器人,能够实现太极拳表演、刀术表演、腾空行走等复杂运动,同时也开发了高仿真人形机器人。在仿人机器人乒乓球对打、人机器人乒乓球对打研究中,北京理工大学、中国科学院自动化研究所、浙江大学等单位开发了乒乓球的高速识别与轨迹预测、击球策略与控制等关键技术,实现了多回合乒乓球对打。
仿生四足机器人
自然界中的哺乳动物、昆虫、两栖动物等都是依靠腿足在复杂环境中自由行动的,因此,研究仿生四足机器人或多足机器人将具有较为理想的复杂环境通过能力,适合在野外、灾害现场等特殊环境下进行运输、救援作业。
波士顿动力公司研制的Big Dog、Alphadog、LS3等系列液压驱动四足仿生机器人,机器人具有负载能力高、环境适应性好、行走速度快、续航能力强等特点,但由于采用燃油发动机,噪声问题较为突出。该公司还研制了Cheetah、Wildcat等四足机器人,可实现高速奔跑。麻省理工大学仿生机器人实验室开发的基于电机驱动的四足机器人可在高速运动中识别障碍并起跳越过障碍。
山东大学研制了液压驱动四足机器人实验样机,实现了动步态行走、扰动下的自平衡等。
此外,韩国工业技术研究院开发的液压马达驱动四足机器人、意大利技术研究院开发的HyQ,以及国防科技大学、北京理工大学、哈尔滨工业大学等单位都在四足仿生机器人方面开展了大量工作。
仿鱼机器人
由于鱼类具有高效率、高机动、高加速度、低噪声、水下适应性良好等特点,因此,研究仿生机器鱼可以极大提升水下机器人的效率、性能和复杂环境适应能力,代替人类完成长期水下监控和作业。
麻省理工学院最早研制了基于尾鳍推进的仿金枪鱼的机器人和仿狗鱼的机器人,大阪大学针对胸鳍推进研制了仿生黑鲈机器人,英国Heriot-Watt大学则最早探讨了波动鳍机构。英国Essex大学设计的仿生机器鱼G9在伦敦水族馆进行了展示。美国西北大学研发了仿生裸背鳗机器人,并开展了基于电场检测的环境障碍识别与避障研究。南洋理工大学、大阪大学都开发了一系列基于波动鳍推进的仿生机器鱼。
北京航空航天大学研制了SPC系列仿鱼机器人,并开展了湖试和海试工作,该型机器人在水下考古、环境监控中进行了应用示范。中国科学院自动化研究所研制了仿鲤鱼机器人、仿狗鱼机器人、仿海豚机器人、仿鳐鱼机器人等多种水下机器人系统,在浮潜控制、倒游控制、定深控制、自主避障、快速启动控制、水平面和垂直面快速转向控制、多鱼协调控制等方面开展了大量的研究和实验验证工作,实现了仿生机器海豚的跃水运动,仿生水下机器人-作业臂系统Rob Cutt-I的水下目标自动抓取等。国防科技大学研制了波动鳍推进机器鱼。华盛顿大学、佛罗里达中心大学、日本名古屋大学、美国新墨西哥大学、哈尔滨工程大学、哈尔滨工业大学、中国科学技术大学、北京大学等单位都在仿鱼机器人方面开展了研究工作。
其他仿生机器人
针对不同应用需求,国内外学者开发了各种不同类型的仿生机器人。
仿蛇型机器人可在草地、沙地、平底、缝隙等环境下运动,东京工学院的ACMR5、密西根大学的Omni Tread、挪威理工大学的Kulko、卡内基梅隆大学的Uncle Sam、以及国防科技大学、中国科学院沈阳自动化研究所、上海交通大学、北京航空航天大学等研制的蛇形仿生机器人均实现了多种仿蛇运动,部分机器人在附加防水蒙皮后还可以实现水中游动,卡内基梅隆大学的UncleSam还实现了爬树运动。
仿生两栖机器人适合在水陆两种环境下运动,瑞士洛桑理工学院(EPFL)的Salamandra、纽约瓦萨学院的Madeline、加拿大约克大学的AQUA、美国东北大学的仿生机器龙虾、哈尔滨工程大学的仿生机器螃蟹、中国科学院自动化研究所、中国科学院沈阳自动化研究所、北京航空航天大学等单位的水陆两栖机器人等,均能够分别实现水中和陆地运动,但由于不同地面的物理特性,导致机器人安全快速地由陆入水和由水登陆的性能还有待提高。
仿生飞行机器人主要考虑模仿鸟类和昆虫飞行的高效率、高机动性等性能,如德国Festo公司的Smartbird、多伦多大学的Mentor、加州大学伯克利分校的飞行昆虫、西北工业大学、南京航空航天大学、北京航空航天大学等单位的扑翼飞行机器人。
此外,还有哈佛大学的仿海星软体机器人、斯坦福大学仿壁虎脚部结构并可攀爬墙壁的仿生机器壁虎、南加州大学研制的自重构机器人、名古屋大学的仿生长臂猿机器人等特色鲜明的仿生机器人系统。
仿生机器人的应用
尽管绝大部分仿生机器人还处于研发阶段,但其应用前景广阔,部分仿生机器人系统已获得应用。
仿人机器人如Nao、Pepper,四足机器人如索尼机器狗Aibo等已进入教育、娱乐、陪伴、导游导览等领域,如通过人脸识别识别不同说话人、人机对话为人提供必要的信息服务和产品介绍、利用机器人进行科学研究、通过舞蹈表演、机器人比赛用于展示和教育。中国科学院自动化研究所研发团队开发的仿生机器鱼系统在大学和科研机构用于仿鱼运动机理、控制与协作的研究,在国内多个科技馆用于科普教育。同时,该研发团队通过中国科学院自动化研究所(洛阳)机器人与智能装备创新研究院进行了小型教育娱乐仿生机器鱼的产业化,用户可以通过手机遥控机器鱼实现灵活的水上运动。
作者单位:
王颖北方重工集团有限公司隧道掘进装备分公司
王硕中国科学院自动化研究所


版权:《高科技与产业化》编辑部版权所有 京ICP备12041800号 地址:北京市海淀区中关村北四环西路33号 邮编:100080 联系电话:(010)82626611-6618 传真:(010)82627674 联系邮箱:hitech@mail.las.ac.cn |