
农机自动导航控制技术研究及系统研发
农机自动导航控制技术是实现农机精准作业的重要支撑技术。它可使装备按照优化的作业路径工作,减少重复作业区和遗漏作业区的面积,提高作业效率;可使农业装备在能见度差的恶劣天气条件、夜间正常作业,提高装备利用率;可极大地减轻驾驶员的劳动强度,使驾驶员能够更关注于播种、施肥、喷药、收获等作业控制,提高作业质量。
农机自动导航控制技术是中国科学院沈阳自动化研究所自“十一五”期间就确立的发展方向,旨在利用在工业测控领域的技术积累开拓农机装备智能控制技术研究新方向。近年来在多项“863”计划项目、国家科技支撑计划项目、国家重点研发计划项目、中国科学院重要方向性项目的支持下,面向我国农机信息化、智能化的迫切需求,针对精准农业应用中需要解决的高精度、低成本、高可靠性等挑战性问题,在路径跟踪控制技术、路径规划技术等方面开展了深入研究,提出了一套系统的分布式农机自主导航控制解决方案,取得了具有国际先进水平的技术成果。
单台农机自主导航控制技术
在理论方法研究与关键技术攻关方面,团队重点开展了农机建模、导航控制方法研究。以二轮车模型为基础,采用纯几何方法对农机的运动进行数学描述,建立了农机横向运动学模型;提出了基于AB线的单垄直线路径、多垄跨越直线路径规划方法,基于边界信息的单圈回形路径、多圈回形路径规划方法;提出了基于最优控制理论的线性路径跟踪方法、基于链式系统变换的非线性路径跟踪方法、基于非线性模型预测控制的路径跟踪方法、基于模糊自适应纯追踪模型的路径跟踪方法、基于输入—状态线性化的非线性最优路径跟踪方法等。
在核心装置开发与系统集成方面,面向我国农机信息化、智能化的迫切需求,针对农机导航应用中需要解决的高精度、低成本、高可靠性等挑战性问题,团队提出了一套系统的分布式农机自主导航与变量作业智能控制解决方案。自主研发了基于ARM核心的导航控制器、田间计算机、一体化集成自动转向装置、变量作业控制器、智能CAN节点等农机自主导航与变量作业控制核心装置,如图2所示,构建了一套具有较好通用性的、基于ISO11783总线标准的分布式农机自主导航控制平台,并在稻麦联合收割机、拖拉机、水稻插秧机上等典型农业机械上完成了系统集成与实施验证。

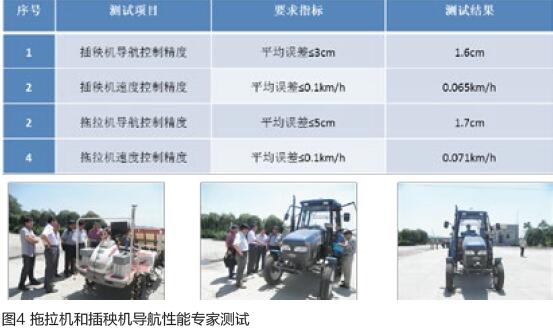
2011年11月,中国科学院沈阳自动化研究所研发的国内首套大型联合收割机自动导航系统通过了由中国机械工业联合会主持的科技成果鉴定,技术水平达到国际先进水平。2013年7月17日,由中国农机院、北京农业信息技术研究中心和东北大学等研究机构和高校的专家组成的专家组对课题组开发的导航控制系统、速度控制系统在拖拉机和插秧机上的性能进行了现场测试,精度如图4所示。
多台农机自主导航控制技术
在理论方法研究与关键技术攻关方面,团队重点开展了联合收割机群协同导航控制和收割机—运粮车主从协同导航控制技术研究。在机群协同导航控制方面,针对收获区域机群路径规划问题,提出了一种基于虚拟结构的路径规划方法。该方法采用跟随—领航几何结构对多台收割机进行编队,并将编队后的收割机群等价为一台虚拟的收割机,将收获作业地块划分为多个作业单元,并采用AB线偏移的方法一次性生成领航者导航路径,跟随者路径则以领航者路径为基准进行规划。针对地头转向区域机群路径规划问题,提出了一种分层地头转向路径规划方法。分层地头转向路径规划方法将地头转向路径规划分为轨迹层和次序层两层,轨迹层不考虑多收割机间的碰撞问题,机群中各收割机独立的规划地头转向轨迹,次序层不考虑地头转向轨迹规划问题,完全根据编队队形生成地头转向次序序列,分层地头转向路径规划方法简化了地头转向路径规划问题。针对相对位姿测量需解决的靶标识别问题,提出了一种基于矩形度的靶标识别方法,可根据靶标的颜色和形状特征快速识别出靶标。该方法采用YUV颜色模型对图像进行分割,可有效去除与靶标颜色区别较大的干扰;基于靶标的形状和姿态特征,采用改进的旋转目标法提取连通区域的外接矩形,通过比较多个连通区域的矩形度,可快速提取出靶标投影矩形区域。针对相对位姿测量需解决的对靶控制问题,提出了一种基于视觉伺服的对靶控制方法。该方法通过在图像中设置内外波门,缩小了靶标投影矩形区域的搜索范围,降低了视觉反馈延迟;采用变尺度变论域模糊控制方法设计对靶控制器,通过引入变论域因子和变尺度因子,提高了控制器的控制精度和鲁棒性。在搭建的收割机群相对定位实验平台上进行了验证实验,实验结果表明本文所提定位方法与收割机群运动速度基本无关,能够满足收割机群协同导航定位要求。针对收获作业区域机群协同导航控制问题,提出了一种基于跟随-领航结构的机群协同导航控制策略。建立了多机协同导航运动学模型,将机群协同导航控制问题分解为纵向距离保持控制和路径跟踪控制两个子问题,克服了跟随-领航法存在误差叠加的缺点;采用滑模控制理论和反馈线性化理论,设计了渐进稳定的队形保持控制律和路径跟踪控制律,保证了路径跟踪控制精度和队形保持控制的稳定性。针对地头转向区域机群协同导航控制问题,提出了一种基于行为的多机协同导航控制方法。该方法将复杂的地头转向任务分解为多个简单的感知行为,并为每种行为匹配开启条件和控制策略,多个行为根据优先级和任务要求进行切换,实现无碰撞地头转向。针对联合收割机-运粮车主从协同问题,以机器视觉为检测手段,提出了一种粮箱装载状态实时检测与协同作业方案。
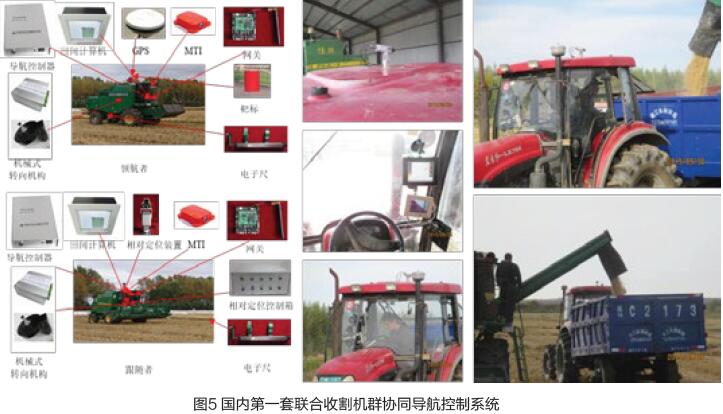
在核心装置开发与系统集成方面,自主研发了相对定位装置、多机协同导航集成控制箱、无线网关、收割机粮箱装载状态集成装置等核心装置,在原有单机导航装置的基础上,研发了国内首套大型联合收割机导航控制系统,如图5所示。
2015年9月29日,在黑龙江胜利农场进行了联合收割机群协同导航控制系统的田间测试实验,平均导航偏差为6.26cm,多台收割机协同完成收获作业任务,无碰撞、漏割情况发生。
作者单位:中国科学院沈阳自动化研究所
团队介绍
研究团队目前科研人员15人,其中研究员2名,副研究员4名。主要对农机装备的行走、作业和管理等方面进行相关智能化技术研究,具体包括:农机自动导航技术,研究基于北斗定位系统的路径规划、导航跟踪、安全避障、同种/异种农机协同导航控制等实现农业精准化作业的基础技术与核心装置;农业装备作业测控技术与装备,根据各型高端农机的智能化需求,研究变量作业控制、进行各类作业部件的工况检测与实时调控,并进行总体作业参数的优化调控;农业装备运维服务技术,监测农机群的时空及运行参数,获取海量农机数据,并采用大数据技术进行故障诊断、预防性维护等方法和技术研究。


版权:《高科技与产业化》编辑部版权所有 京ICP备12041800号 地址:北京市海淀区中关村北四环西路33号 邮编:100080 联系电话:(010)82626611-6618 传真:(010)82627674 联系邮箱:hitech@mail.las.ac.cn |